Drone PID Simulation Tool
Task: build a teaching tool for QUT Aerospace Society (QUTAS) members to learn Simulink and PID control hands-on, rather than just from theory. This project is still in its early stages.
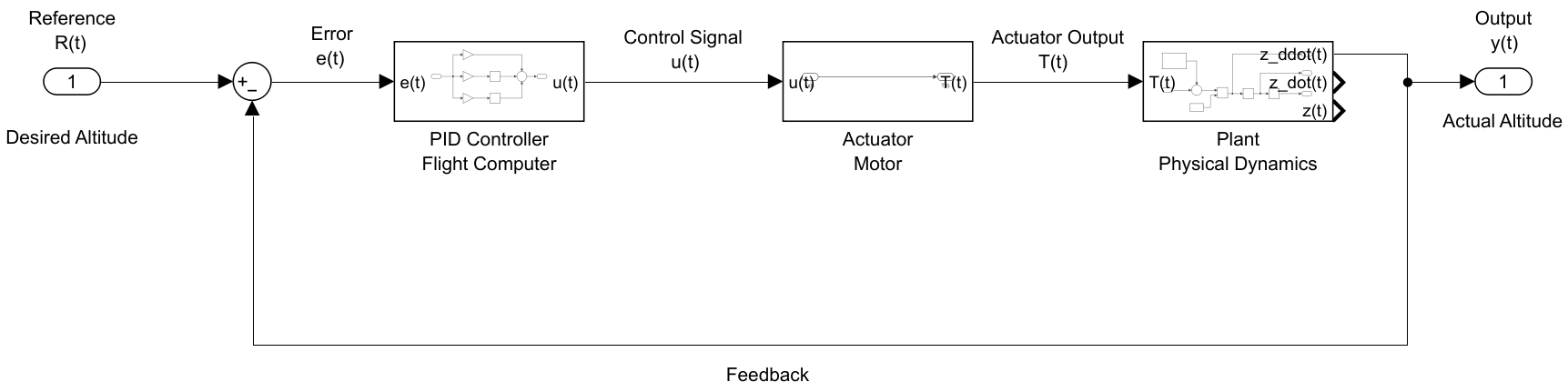
Approach: the tool models a quadcopter’s altitude loop as a Simulink block diagram, a reference altitude compared against the actual altitude to get an error signal, fed through a PID controller into a motor/actuator model and then the vehicle’s physical dynamics, with the resulting altitude fed back to close the loop. It’s paired with a MATLAB Live Script that lets a member interactively adjust the proportional, integral, and derivative gains and immediately see the effect on the simulated drone’s step response. The goal is to make the connection between a PID gain and what it actually does to a real (simulated) system immediate and visual, rather than abstract.
Outcome: currently a working Simulink model plus an interactive Live Script for tuning and visualising step response, the first building block toward a fuller teaching tool for the club. Still early days, more features (additional flight modes, a clearer guided walkthrough for members new to control theory) are planned.