FPV Drones
Project overview
An ongoing personal hobby: building, repairing, and flying FPV drones, from tiny whoops to 5-inch freestyle quads. This page covers a few distinct facets of it rather than a single build, repair work, simulator practice, and an active 5” build, and keeps growing as new builds and repairs happen.
Tiny Whoops
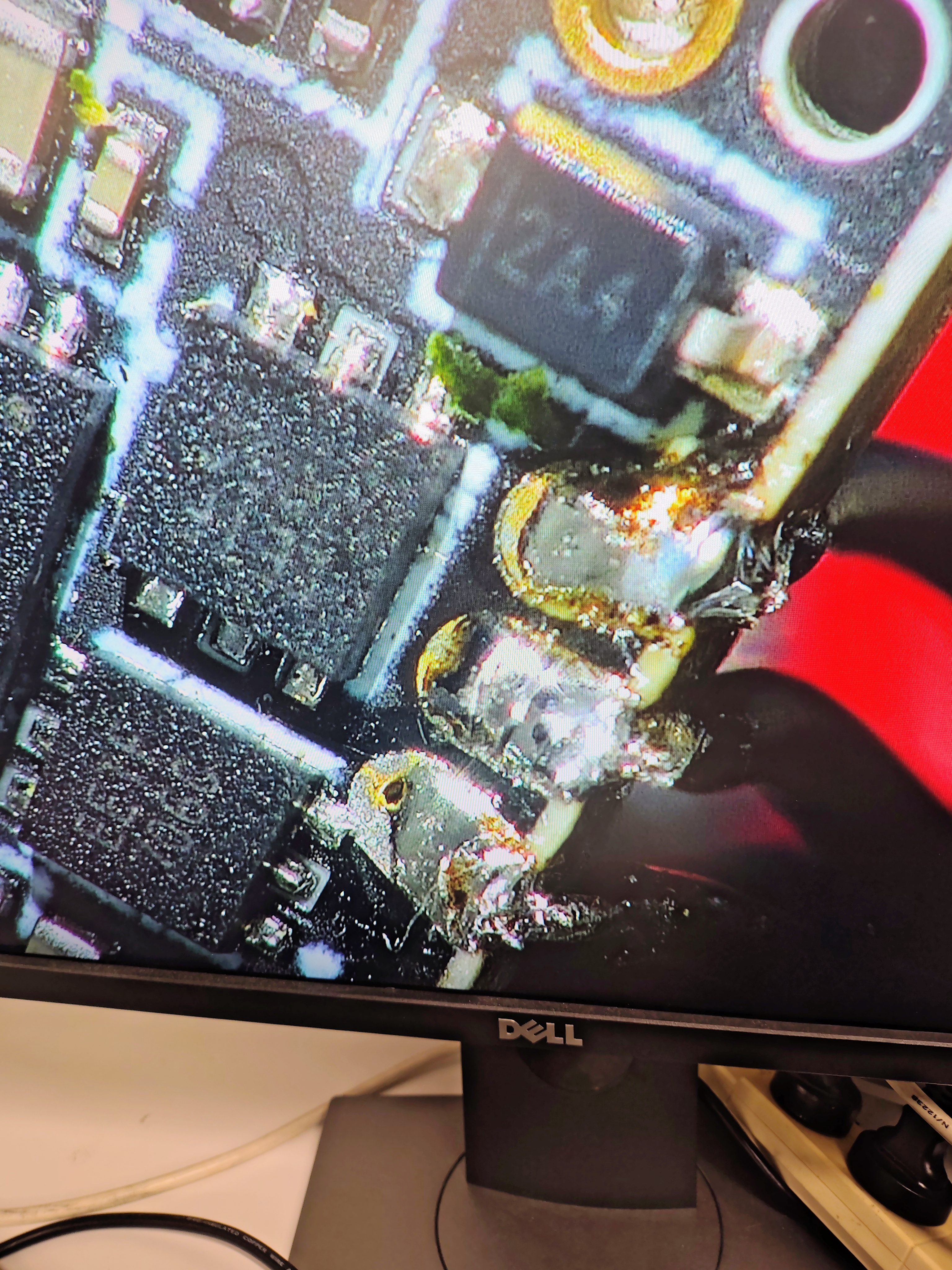
Tiny whoops take a lot of crash damage for their size, and motors are usually the first thing to go, so replacing one is a routine repair rather than a rare one. Inspecting and reflowing the solder joints under magnification makes the difference between a clean, reliable repair and one that fails again mid-flight.
Practicing in the simulator
Acro mode has no self-levelling: the sticks command rotation rates directly, and the pilot is fully responsible for attitude, so building that muscle memory in a simulator first is far cheaper than doing it over real hardware. I use a Radiomaster transmitter bound directly to a laptop simulator to practice freestyle and racing lines before flying them for real.

That practice carries straight over to real flying: the same acro inputs, now with a real digital HD FPV feed and OSD (voltage, GPS lock, link strength) instead of a simulated one.

SpeedyBee 5” Drone
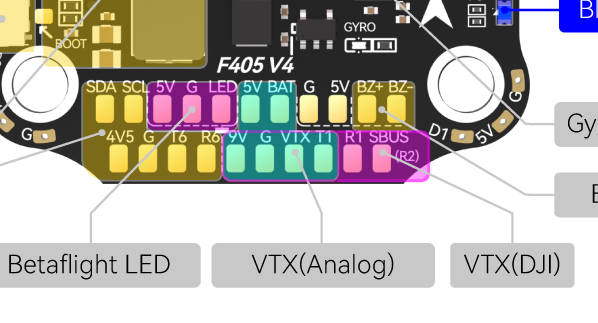
5-inch FPV quadcopter build using a SpeedyBee F405 V4 flight controller stack, working from the board’s own pinout reference to wire up the LED, VTX, and receiver connections correctly.
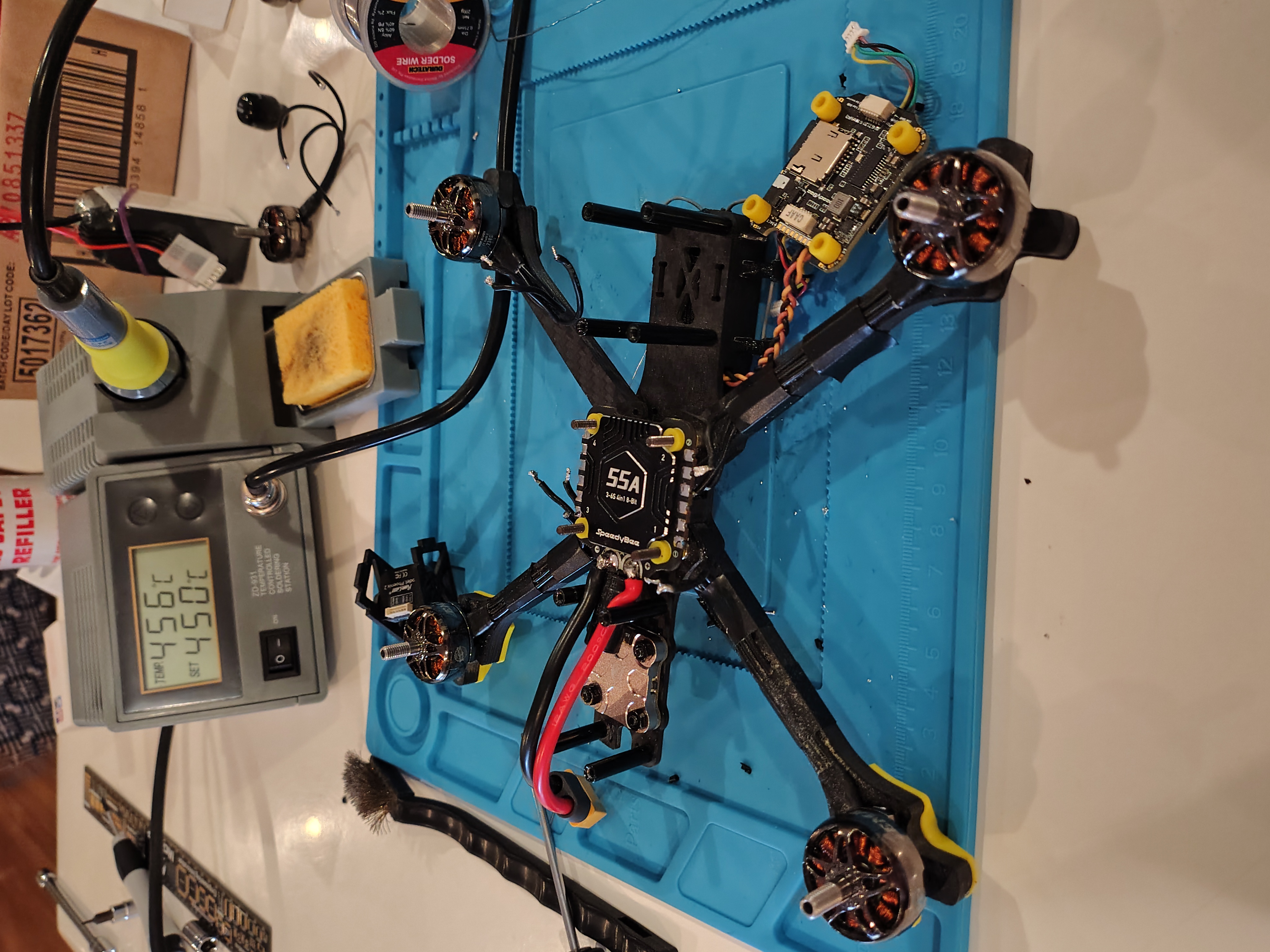
Build log and more photos coming soon.
Current status
In progress: the SpeedyBee 5” build is wired and being finished off; tiny whoop repairs and simulator practice are ongoing, not one-off events.